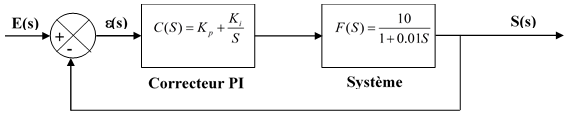
Système 1
- Cahier de charge : un temps de réponse de 30 ms
- Déterminer les paramètres du correcteurs PI.
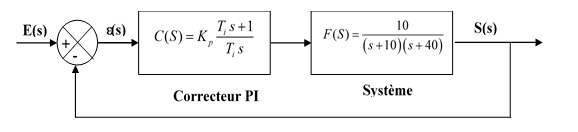
Système 2
- Cahier de charge : un temps de réponse de 30 ms et un facteur d’amortissement de 0.7
- Déterminer les paramètres du correcteurs PI.
Exercice 2
Un entrainement électromécanique du 1er ordre est asservi selon la boucle classique
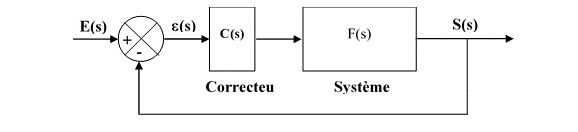
La fonction de transfert du système a été déterminée à partir de mesures en boucle ouverte :
1. Le correcteur C(p) étant pour l'instant indéterminé, calculer l'expression de la Fonction de Transfert en Boucle Fermée (FTBF).
On impose à cette FTBF d'être identique à un modèle du 2ème ordre Hm(s) caractérisé par les paramètres suivants : - Un facteur d’amortissement de 0.8.
- tr : 1/5e du temps de réponse du système non corrigé en boucle ouverte,
- Gain statique égal à 1 (pas d'erreur statique).
2. Déterminer la fonction de transfert Hm(s).
3. Calculer alors l'expression du correcteur C(s).
Exercice 3
Soit un entrainement électromécanique dont on donne la fonction de transfert
On considère un correcteur PI standard
On va étudier par les techniques de Correction par compensation des pôles pour le réglage des paramètres Ti et Kp.
1. Donner l'expression de FTBO lorsque Ti = 0.1s.
2. A partir du résultat précédant, calculer la FTBF du système ainsi corrigé.
3. Déterminer la valeur de Kp permettant d'obtenir un temps de réponse égal à 1/5e du temps de réponse du système non corrigé en boucle ouverte.
Exercice 4
Soit un entrainement électromécanique dont on donne la fonction de transfert
On considère un correcteur PI standard
On souhaite conserver un correcteur type PI standard et on cherche à régler K et Ti.
1. Calculer l'expression littérale de la FTBF.
2. Calculer à présent K et Ti permettant d'imposer à la FTBF les mêmes pôles que ceux du modèle Hm(s) du 2e ordre établi à l’exercice 2 (i.e. le dénominateur de la FTBF doit être identique à celui du modèle précédent).
Exercice 5
Soit ; la fonction de transfert d’un système asservi à l’aide d’un régulateur PID.
la réponse fréquentielle est donnée par la figure
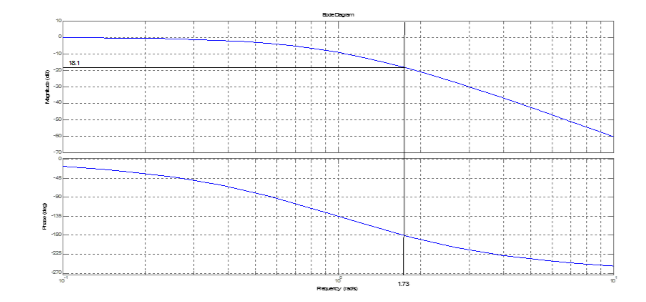
1. Déterminer par la méthode de Ziegler-Nichols les 3 paramètres du régulateur
Exercice 6
Soit ; la fonction de transfert d’un système asservi à l’aide d’un régulateur PID.
la réponse indicielle, est donnée par la figure
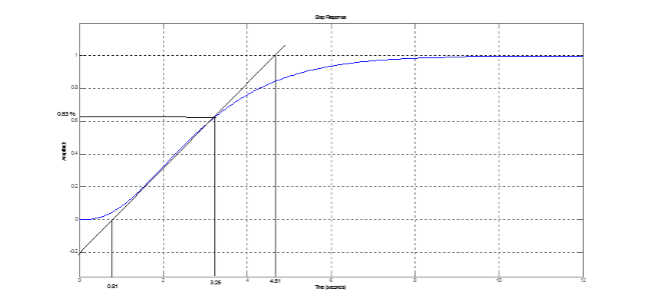
1. Déterminer par la méthode de Ziegler-Nichols les 3 paramètres du régulateur


